Academic Publications
-
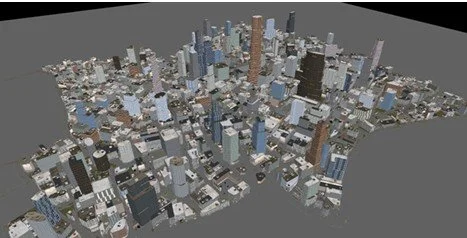
A Perception-based Fuzzy Route Planning Algorithm for Autonomous Unmanned Ground Vehicles
Path planning plays an integral role in mission planning for ground vehicle operations in urban areas. Determining the optimum path through an urban area is a well-understood problem for traditional ground vehicles; however, in the case of autonomous unmanned ground vehicles (UGVs), additional factors must be considered. For an autonomous UGV, perception algorithms rather than platform mobility will be the limiting factor in operational capabilities.
-
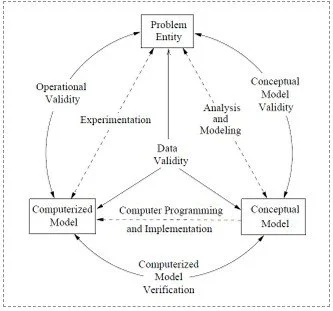
A novel framework for verification and validation of simulations of autonomous robots
Modelling and simulation (M&S) plays a critical role in both engineering and basic research processes. However, M&S is only truly useful if the model and simulation outputs are accurate. As such, signi cant research has been undertaken to establish what accurate means for simulations and what subsequent level of trust should be given to M&S outputs.
-
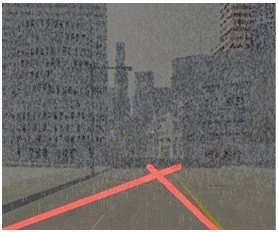
Quantifying the E ects of Environmental Conditions on Autonomy Algorithms for Unmanned Ground Vehicles
Autonomy for commercial applications is developing at a rapid pace; however, autonomous navigation of unmanned ground vehicles (UGVs) for military applications has been deployed to a limited extent. Delaying the use of autonomy for military applications is the environment in which military UGVs must operate. Military operations take place in unstructured environments under adverse environmental conditions.